Exploding Array Function
original
Array Notation
by Jonathan Bowers
comments and algorithms by
Giga Gerard
My Exploding Array Function is the
generalized form of the various array notations that I have developed a
few years ago, such as (linear) array notation, extended (or
dimensional) array notation, and tetrational array notation, etc with a
few modifications. Originally the various array notations had several
rules - 5 for the linear, 7 for the extended, and for the tetrational I
was still trying to work it out - now, there's only three rules and it
takes care of all arrays, even way past tetrational arrays.
How it Started
Over the years, I have been interested in large numbers, even to the point of coining names for several, see my "illion numbers" page.
One day (about 20 years ago) I read a book (don't remember the name)
which discussed operators beyond powers, operators such as tetration,
pentation, hexation, etc. This got me interested in investigating more
extreme numbers as well as extreme spaces beyond dimensional space
(spaces that I now call, super dimensional, trimensional,
quadramentional, etc). As time went on, I started to develop an
extention to the operators seen in that book, these I will refer to as
extended operators. Later after looking into known large number
functions such as Ackermann's Function and Conway's Chained Arrow
Notation, I could compare the extended operators with these well known
functions. The extended operators far surpassed Ackermann's Function,
and could actually be compared to Conway's Chained Arrow - check out M. Rob's large numbers page for details.
Later I took on the task of extending the extended operators - I later
discovered that extended operators could be defined by four numbers,
and the next extention by five. This is the beginning of the
development of my Array Notation.
Array Notation
First row, first dimension in
Bean
or
Beaf
The five rules for the original Array Notation were as follows:
Recursion 1 over a function row
Rules to evaluate arrays U of a single row,
with wildcards in upper case for arbitrary sequences,
and integer variables n = 1..:n>0
as usual in lower case.
Rep :n
is to repeat the left selected
word in the expression n times.
- {a,b} = a*..1 :b = a^b
- {X,1} = {X}
- {a,1,Z} = a
- {a,b1,1,..11Z} 1,:k = {a,..V,1Z} a,:k1
- {a,b1,c1,Z} = {a,V,c,Z}
-
let U = {a,b1,Y} then V = {a,b,Y}
As such Bowers defines his systems Bean and Beaf
for the initial row.
Various upload systems can be created by bending rule 4.
For example, Eat could put value b1
in place of the last 1 and nothing more,
so that after iteration of its rule 4
value b is assigned to all but the lowest entries
(eat the row),
in
{a,b1,b1,/b,:k-/Z} that is.
Rule 4 of system Beat would upload value
b1 to all prior entries at once.
And Beate as an extra substitutes V
as above, which makes her the fastest function
we've ever seen on the first row.
For the same expression Beat results in smaller
and Beate in larger numbers than Bowers' function.
Note that none of these systems is
significantly faster than the other, because
the difference expressed in any last parameter z
is less than 1 really.
Rule 1: Condition - only 1 or 2 entries - {a} = a, {a,b} = a+b Chris
Bird has suggested changing this to a^b for two reasons - first, so it
can be easier to compare with Conway's Chained Arrow, second so it will
jibe with rule 2 better (note that a^1=a where a+1 is not), I decided
to make the change.
Rule 2: Condition - last entry is 1 - {a,b,c,...,k,1} = {a,b,c,...,k}
Rule 3: Condition - 2nd entry is 1 - {a,1,c,d,..,k} = a
Rule 4: Condition - 3rd entry is 1 -
{a,b,1,..,1,d,e,..,k} = {a,a,a,..,{a,b-1,1,..,1,d,e,..,k},d-1,e,..,k} -
the ".." between the 1's represent 1's - there can be any number of
ones, from 1 "1" (3rd entry alone) to a string of 1s - the last 1 of
this string is what becomes {a,b-1,1,..,1,d,e,..,k} all entries prior
becomes "a". For an array like this {3,2,1,1,1,5,1,2} the last 1 in the
string is the one before the 5 (not the one after - since it is a
different string of 1s).
Rule 5: Condition - Rules 1-4 doesn't apply - {a,b,c,d,...,k} = {a,{a,b-1,c,d,...,k},c-1,d,..,k}
Extended Operators
Sidestep operator notation
Following shows how the operators work as well as my extension on those operators.
a {c} b = {a,b,c}, where c=1,2,3,4,5 etc represents adding,
multiplying, exponentiation, tetration, pentation, etc. (After Bird's
suggestion, I decided to let a {1} b = a^b instead of a+b to match the
modified array notation, so the results are different now).
Tetration is also known as power towers, it is also represented as
a^^b = a {4} b (under old version) = a {2} b (under new version) =
a^(a^(a^(a^.....^a)...)) a to the power of itself b times.
Pentation is a tetrated to itself b times = a^^^b = a{5}b (old
version) = a(3)b (new version), from now on lets use the new version.
Now for the extended operators.
a {{1}} b = a { a { a....a { a { a } a } a.... a } a } a (b a's from center out) - I call this a expanded to b
a {{2}} b = a expanded to itself b times (or a multiexpanded to b) = a {{1}} (a {{1}} (a {{1}} (a .... (b times)
a {{3}} b = a multiexpanded to itself b times (or a powerexpanded to b)
a {{4}} b = a powerexpanded to itself b times (or a expandotetrated to b)
etc.
Evaluate, with reps :n: of words selected by dots to both sides:
{a,b1,1,2} = {a,a,{a,b,1,2}}
== {a,a,..1.} :b1:
= {a,a,..a.} :b: = a{{1}}b1
{a,b1,2,2} = {a,{a,b,1,2},1,2}
== {a,..1.,1,2} :b1:
= {a,..a.,1,2} :b: = a{{2}}b1
{a,b1,c1,2} = {a,{a,b,c1,2},c,2}
== {a,..1.,c,2} :b1:
= {a,..a.,c,2} :b: = a{{c1}}b1
Here's how this compares to Array Notation: a {{c}} b = {a,b,c,2}
a {{{1}}} b = a {{ a {{ a ... a {{ a {{ a }} a }} a ... a }} a }} a ( b a's from center out) - I call this a exploded to b.
a {{{2}}} b = a exploded to itself b times (a multiexploded to b)
a {{{3}}} b = a multiexploded to itself b times (a powerexploded to b)
a {{{4}}} b = a powerexploded to itself b times (a explodotetrated to b)
etc.
Again, here it is compared with Array Notation: a {{{c}}} b = {a,b,c,3} etc.
{a,b,1,3} == {a,a,..1.,2} :b: = a{{{1}}}b
{a,b,2,3} == {a,..1.,1,3} :b: = a{{{2}}}b
{a,b,c1,3} == {a,..1.,c,3} :b: = a{{{c1}}}b
{a,b,c1,4} == {a,..1.,c,4} :b: = a{{{{c1}}}}b
These operators can be notated more naturally:
{a,b,c,5} = a{{{{{c}}}}}b = a{c,5}b
{a,b,c,d} = a{..c.}b {:d:} = a{c,d}b
a {{{{1}}}} b = a detonated to b = {a,b,1,4}
a {{{{{1}}}}} b = a pentonated to b = {a,b,1,5}
{a,b,1,1,2} = {a,a,a,{a,b-1,1,1,2}} = a {{{{{{{....{{{a}}}....}}}}}}} (where there are a {{{{{...{{a}}...}}}}} a brackets (where there are a {{{{..{{a}}..}}}} a brackets ( where there are .......b times ..... (where there are a brackets)))))) - YIKES!!
Chris Bird has shown in a proof (which we can call Bird's proof)
that four entry arrays are comparible to Conway's Chained Arrow
Notation and five entry arrays far surpass it.
No real difference between operators and array function here.
{a,b,1,1,2} = {a,a,a,..1.} :b: = a{1,1,2}b
{a,b,2,1,2} = {a,..1.,1,1,2} :b: = a{2,1,2}b
{a,b,c1,1,2} = {a,..1.,c,1,2} :b: = a{c1,1,2}b
{a,b,1,2,2} = {a,a,..1.,1,2} :b: = a{1,2,2}b
{a,b,c,2,2} = a{c,2,2}b
{a,b,c,d,e} = a{c,d,e}b
{a,b,c,d,e,f,g,h} = a{c,d,e,f,g,h}b
{a,b,Z} = a{Z}b
Currently I have operator notations for up to 8 entry arrays (i.e.
{a,b,c,d,e,f,g,h}), however they will be quite cumbersome to type out -
a,b, and c are shown in numeric form, d is represented by brackets (as
seen above), e is shown by [ ] like brackets, but rotated 90 degrees,
where the brackets are above and below (uses e-1 bracket sets), f is
shown by drawing f-1 Saturn like rings around it, g is shown by drawing
g-1 X-wing brackets around it, while h is shown by sandwiching all this
in between h-1 3-D versions of [ ] brackets (above and below) which
look like square plates with short side walls facing inwards. - one of these days, I'll add a jpeg.
Extending Array Notation
Bean system
Later I decided to extend array notation (which used a 1-D array) to
allow for many dimensions in the array - I called it Extended Array
Notation. Since multidimensional arrays are difficult to type out, Bird
suggested using bracketed numbers to represent separating n-D
structures, example: {3,3,3 (1) 3,3,3 (1) 3,3,3 (2) 3,3,3 (1) 3,3,3 (1)
3,3,3 (2) 3,3,3 (1) 3,3,3 (1) 3,3,3} represents a 3-D array - a 3^3
array of 3's to be exact, which when solved will give the enormous
number "dimentri".
Following are the rules for Extended Array Notation using Bird's inline technique:
Rule 1: Condition - only 1 or 2 entries, only 1 dimension - {a} = a, {a,b} = a^b was originally a+b
Rule 2: Condition - rows ending with 1. - {# (n) a,b,c,...,k,1 (m)#} = {# (n) a,b,c,...,k (m) #} - # denotes remainder of array.
Rule 3: Condition - 2nd entry of main row (which is the very first row) is 1 - {a,1,c,d,..,k #} = a
Rule 4: Condition - 3rd entry is 1, next non-1 entry in same line - {a,b,1,..,1,d,e,..,k #} = {a,a,a,..,{a,b-1,1,..,1,d,e,..,k #},d-1,e,..,k #}
Rule 5: Condition - Rules 1-4 doesn't apply, there are at least 3 entries on main row - {a,b,c,d,...,k #} = {a,{a,b-1,c,d,...,k #},c-1,d,..,k #}
Recursion 2 over dimension types
Rules to evaluate expressions {U}
in multiple array dimensions.
In every rule the left expression is reduced = to the right,
and == is to repeat this rule.
A colon : applies a term-rewrite to a word,
and := is one way substitution (right for left).
Signs in /cyan/
are syntax of our own Regular Expressions flavour,
with reps :n
notated inside now, directly after the selected word.
Dimensional separators are indexed or subscripted commas,
so instead of inline (S) we write ,[S] inside arrays
and equate ,[0] to ,[] to ,
Brackets [] open a new level
in the array, following a comma ,[
they open a separator level ],
else [
a rewrite array function is opened ]
on a deeper level, which we precede by a D
to denote a dimensional array.
We leave out the outer brackets {}
of U for reasons of clarity.
-
a,b := D[a,b] = a^b
(initial power)
-
D[a,1] ≡ D[a] = /1:a/ = a
-
D[a,b1] ≡
/D[a,b]:a/
-
X,[S]1/(,[1T]Z)?/ =
X/_0
(drop trailing entry
1)
so X,[S]1 =
X where ,[] ≡ ,
X,[S]1,[1T]Z =
X,[1T]Z
-
a,1,Z = a
(inner collapse)
-
a,b1,/1,:k/11Z =
/a,:k1/{V},1Z
(upload on row)
if U = a,b1,Y
then V = a,b,Y (precursor of U)
-
a,b1,11Z = a,{V},1Z
(value motor)
==
{a,..1.,1Z} :b1:
= {a,..a.,1Z} :b:
-
a,b/,[Si]:s/11Z =
/D[a,b,Si],[Si]:s/1Z
(dimension motor)
-
D[a,b,1] ≡
/a,:b/1
-
D[a,b,2T] ≡
/D[a,b,1T],[1T]:b/1
-
else D[U] ≡
D[U']
(upload step in Bean)
and V' := D[V]
(decreasing precursor)
if D[a,1,Z] ≡
D[a] ≡ a
or V' := V0
(fixed precursor in Beaf)
= a,b-/,[Si]:s/2Z
-
a,b/,[Si]:s//1,:k1/11Z =
/D[a,b,Si],[Si]:s//a,:k/{V},1Z
(upload over dimensions)
-
D[a,b,0] ≡ a,a
(to cover rule 4. by S1=0
and s=1)
Physical evaluation issues
In Beaf subrule 6.3 the substituted
V0 is fixed
for all evaluations of new block series
D[Xj],[Tj]..
It is important to keep the same outer expression
(and fixed precursor),
if we want to refer outside of these dimension blocks.
For suppose you'd reduce one block D[a,b,1]
on the left, and (before resolving the many blocks D
in the middle) restart the motor rule of the
outer expression a,a,a,Z.
Then when you stop the motor at any step m
this would result in varying outer Vm
(for example if the second entry is down to 2
the projected Vm=a is smallest).
So if these erratic Vm
were to substitute in the blocks D still waiting,
the whole expression would be randomized
(yet reducible to an extremely random number).
This happens when we work away dimensions D
from left to right – the wrong direction!
All (sub)expressions should be resolved from right to left.
So in Beaf we assign the precursor V0
of the original expression U0
to all substituted V' in the D
then issued, and evaluate all block series of D
from right to left.
But if the separator subscript S in
a,b,[S]Z
contains a similar array, for all next level D1[U]
the precursor V1 must be derived
and stored separately.
We have to remember one Vn for each uploaded
Dn level – and in our
record number
there are 104.
A less abstruse problem is that we usually have to substitute many words
V before a number result is reached.
If we work from the top down
in these algorithms, the amount of simultaneous nestings of
V keeps growing.
Keeping track of the memory addresses to store those
V alone produces a heap error on any computer.
To avoid this overhead, you'd best apply the counterintuitive method
of evaluating from the bottom up –
which in effect means building a complete system.
Also the Beat method of substituting the 2nd parameter value
(instead of V) for all entries 1 to the right
can be used to simplify rule 4 and 7.
Because b is not significantly smaller than V
(argumented
below)
this system is as powerful as Beaf.
Bowers had no business with it,
so we call our system Beat
Beate's Express Array Train
and dedicate it to Beate Völker of Utrecht University,
with Godspeed!
System Beat for a,b,1,..Z
uploads b to all entries 1
along the way (instead of a).
In the system Beate we keep the Extra
substitution of V0
for the rightmost 1.
Eventually (...) any expression will be reduced fully,
resulting in a Big number 1..
But usually the amount of dedicated supercomputer-filling universes
to be able to perform such a calculation is not significantly less
than the resulting number itself.
Rule 6: Condition - two entries on main row, next non-1 entry begins a row - (a,b (n)...(k) c #} = {b^n array of a's (n)...(k)
c-1 #} - this is hard to describe, but the (n)...(k) could be anything
from going to the next row (i.e. (1)) to something like this:
(4)(4)(4)(4)(4)(3)(3)(3)(3)(2)(2)(2)(2)(2)(2)(2)(2) - which means going
into the next 5 4-D regions, then into the next 4 realms (3-D), then
into the next 8 planes - this example will be solved as {b^4 array of
a's (4) b^4 array of a's (4) b^4 array of a's (4) b^4 array of a's (4)
b^4 array of a's (4) b^3 array of a's (3) b^3 array of a's (3) b^3
array of a's (3) b^3 array of a's (3) b^2 array of a's (2) b^2 array of
a's (2) b^2 array of a's (2) b^2 array of a's (2) b^2 array of a's (2)
b^2 array of a's (2) b^2 array of a's (2) b^2 array of a's (2) c-1 #}.
Rule 7: Condition - two entries on main row, next non-1 entry is preceded by 1's in it's row - {a,b (n) ... (k) 1,1,...1,1,c #} = {b^n array of a's (n) ... (k) a,a,...a{a,b-1 (n) ... (k) 1,1,...1,1,c #},c-1 #} - same thing with the (n) ... (k)
As you can see - the rules are getting very complicated to write down
Yet one can keep going into higher spaces, higher than dimensional
space - consider the tetrational spaces (which includes super
dimensions, trimensions, quadramensions, etc.) - what is this exactly -
dimensional spaces can be represented as X^n
R^n = {a,b,[n]2}
where X represents a line,
X^2 would then be a plane, X^100 would be 100 dimensional. Super
dimensions are of this order - X^(X^n), trimensions, quadramensions,
etc are as follows: X^(X^(X^n)), X^(X^(X^(X^n))), etc. - these kind of
arrays are possible - so array notation can be addapted to these
arrays, but the rules get trickier. Using Bird's inline technique we
can represent super dimensional space as follows: {# (a,b,c,....,k) #}
which represents going to the next a'th dimension of the b'th second
level of dimensions of the c'th third level of dimensions .... of the
k'th n'th level of dimensions - notice this is only super dimensions,
it gets crazier in trimensions on up.
Let schematic expressions X^Y denote dimensional structures.
{3,2,[1,2]2} = D[3,2,1,2]
= D[3,3,3] = {3,3,[3]2}
= D[3,3,2],[2]D[3,3,2],[2]D[3,3,2] = R^3
Superdimensional Bean:
{a,2,[1,2]2} = D[a,2,1,2] = D[a,a,a] = R^a
{a,3,[1,2]2} = D[a,3,1,2] = D[a,a,{D[a,a,a]}] = R^R^a
{a,b,[1,2]2} = D[a,b,1,2] = R^^b
{a,3,2,[1,2]2} = {a,{a,a,[1,2]2},[1,2]2} = R^^R^^a
Super-pentational
Bean:
{a,b,2,[1,2]2} = R^^^b
{a,2,c,[1,2]2} = R^..a ^:c
{a,b,c,[1,2]2} = R^..b ^:c1
But Arrays can go even further - there are also pentational arrays
such as an X^^^6 array which would be an X^^(X^^(X^^(X^^(X^^X)))) array
where X^^X alone would be an X^(X^(X^(....^(X^X))....)))) array. Bird
has attempted to write rules for extending past dimensional arrays and
appears to have captured rules that fit tetration and possibly
pentation - but they get quite tedious.
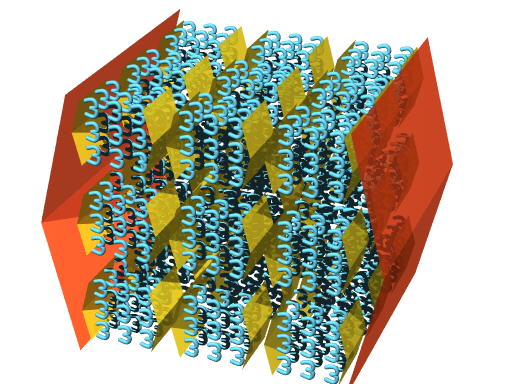
Below is a picture showing a 2 superdimensional array that leads to
the number "dulatri" - the yellow brackets represent dimensional groups
- inside could take on any number of dimensions, they represent X^X
structures, the red brackets represents an X^X array of X^X arrays - or
an X^(2X) array.
Exploding Array Function
Beaf principles
Finally, after a bit of tweeking on the array notations, I came up
with a much simpler way of defining the master function behind it all,
I call it the Exploding Array Function, feel free to call it the Bowers's Exploding Array Function
(puts a new meaning to the concept of BEAFing up something). Before we
get to the three rules of the BEAF, here are some definitions:
Definitions:
Array - a structured set of entries (the array will be represented as A)
Entry - a position in the array that holds a positive integer
value (1 is default - so any entry not represented automatically has
the value of 1)
Base - first entry (value represented by b)
Prime entry - second entry (value represented by p)
Pilot - first non-1 entry after prime entry (can be as early as 3rd entry, can be in a different dimension or beyond)
Copilot - entry right before pilot (if pilot is the first
entry on its row, then there's no copilot. Copilot might be the prime
entry itself, if the pilot is 3rd entry.
Structures - structures are sub-arrays of the following
types: entry (X^0), row (X^1), plane (X^2), realm (X^3), flune
(X^4),..,X^n,..,dimensional group (X^X)=X^^2,..,n-D array of
dimensional groups (X^(X+n)),..dimensional group of dimensional groups
(X^(2X)),...X^(2X+n),...m-D array of dim.group of dim.group
of.....dim.groups n times (X^(nX+m)),...dimensional gang
(X^(X^2)),...X^(polynomial),...X^(X^X)=X^^3,....X^(X^X+polynomial),........X^^4,....X^^n,...X^^X,......X^^^X,....X^^^^````^^^X,...etc.
Previous Structures - previous entries are entries
before the pilot but are on the same row, previous rows are rows before
the pilot's row, but are in the same plane, previous n-spaces are
n-spaces in the same n+1-space that are before the pilot's n-space,
etc. They are structures before the pilot's version of that structure,
but on the same structure that is of higher order.
Prime Block - the prime block of an X^n structure is the
first p^n block of entries
left of an n-dimensional separator (n)
in that structure,
- this generalizes to all structures,
turning the X's to p's, where p is the prime. - so if p=10,
and the structure is X^(3X^5+2X^4+3X+6), the prime block
is exploded to
the first 10^(3*10^5+2*10^4+3*10+6) set of entries.
Airplane - a set of entries that include the pilot, all previous entries, and the prime block of all previous structures.
Passengers - any entry in the airplane that is not the pilot or copilot. This will always include the base.
Allowance: Default entries (entries that have a 1 value) can be
chopped off as long as none of the entries change their positions.
Rules:
Rule 1 - the prime rule - Condition: default prime (p = 1) - Result: v(A)=b. where v(A) means value of array.
Rule 2 - the initial rule - Condition: no pilot - Result: v(A)=b^p.
Rule 3 - the catastrophic rule - Condition: first two rules don't apply - Result: Array changes in the following way:
- pilot decreases by 1.
- copilot (if exists) becomes original array, but with its prime entry reduced by 1.
- (*Prime Blocks of) Previous Structures
X^n are exploded to sizes
p^n & b values, so all
passengers take on base value.
- remainder of array remains unchanged.
That's it!! - much simpler - and even more powerful, in that it can be continued as long as the structures can be defined.
Notational rule 0 - finalize trailing entries -
Allowance to drop any default (dead)
and last (right) entries with value 1
together with their preceding (left) separator if it is trailing too.
This is not strictly necessary (for further evaluation),
but cleans up the expression.
Provided the signifying (highest) right separator of
(*the Prime Block of) every Previous Structure remains,
we can choose to drop the default entries
with their (lower) left separators, because rule 3c (or 3c*)
will overwrite all defaulted substructures
with sizes very much larger than the current ones.
A left separator (n)
of an entry 1 is considered "trailing"
(and redundant), when it has a larger (*or equal)
separator (m) directly on the right.
The difference in rule 3c - between exploding only the Prime Blocks (3c*)
of Previous Structures, or keeping and exploding all
Previous Structures up to the pilot entry - is often negligible.
When higher separators occur further on the right (past the pilot)
this rule difference is provably insignificant
for the resulting Big numbers.
The development of higher structures dominates the algorithm.
Nevertheless we feel that keeping all separators
signifying Previous Structures (*not just Prime Blocks)
in rule 3c would be the natural method for Beaf.
Natural, because Bowers allows multiple
b,p (n).. (n):m
to explode to m
series of (n) separated structures
of sizes p^n & b values.
This is pretty obviously maximal, when applied
to the explosion of run down Previous Structures.
Why high structures need deep uploads
In
Bean
dimensional structures X^Y
are formed by the last of Bowers' rules 6 and 7.
Here in
Beaf
and in Bowers' later Hypernomials and Array Sizes
these (second level) structures X^Y
are treated as a brand new notation,
decoupled from their (first level) method of construction.
This is a slow deal, crippling the overall algorithm,
and is contrary to the spirit of what we consider
Jonathan Bowers' great discovery – the upload principle.
To say that an upload rule
dominates the algorithm is an understatement.
Take for instance Bowers' upload to the counted down entry
c –
this in itself is so powerful that,
where Conway needs a whole row of parameters,
Bowers requires just 4 to express an equally Big number.
Combined with a proper motor rule,
the power of uploading its accumulated value is maximal.
The upload rule takes this value b
prepared all the way at the start (left)
of the function array and sends it up to the highest available parameter,
dimension size or (indeed!) structure.
But if we detach any higher structures from the original algorithm
in which these are embedded,
the feedback from the primary accumulation in b
is interrupted.
When dimensional structures would build up from separate set of rules,
as Bowers seems to imply,
those new rules have to start iterating all over again.
And the earlier motor-upload cascade would be broken.
Therefore the idea of simplification as presented above by Bowers
is detrimental for his higher structures,
which from then on increase scale at a subliminal (lower level) rate.
Value b can rival subexpression V
Bowers' algorithm maximizes the value of b
before it is uploaded to the next entry c.
The prime value motor of the Bean machine –
rule 5 –
is successively applied Big c number of times.
This repetition dwarfs the difference between subexpression
V and the value b,
which amounts to a single application of rule 5
or only one c- countdown.
So the substitution of a maximal subexpression V
in Bean may look impressive,
but generally we can upload b instead,
to get an almost equally fast increasing function.
Nevertheless we keep the rules of
Bean
as originally conceived by Bowers.
And we add an option to subrule 6.3
to define Beaf
so that its upload to extended dimensions
will get feedback from original level V0
instead of reduced level D[V] substitutions.
In the next sections we look at the way that V
or equally b
are applied to upload or upgrade dimensions and structures in
Bean rule 6 and 7.
Beaf remains reducible under deep recursion
In our definition of
Beaf
the dimension motor rule 6.3 substitutes the V0
subexpression from the original via dimension blocks into comma subscripts
that quantify dimension types (formerly Bird's bracketed numbers).
This happens over and over.
You may wonder if such an unfathomable construction
maintains reducibility to natural number?
Here we present an argument that it does,
for the whole list of rules.
Rule 1,2,3 are trivial, they just simplify the expression
by letting characters drop.
Rule 4,5,7 substitute a subexpression V
in a position left of a higher iterator.
In V entry b is reduced (by 1)
and because the iterator entry is counted down (by 1)
the expression as a whole is reduced.
This is a common method in Big number land –
we insert subexpression V
that reduces a parameter from the original U, and it goes.
But to put V = U- would be a mistake –
for example a*b = a(a*b)-
is irreducible except for a=1
with 1.. {1:b} as a solution.
Rule 6,7 both count down the dominant entry right of
the subscripted ,[S]
which is kept (and not repeated).
Now the newly substituted dimensions should have a smaller coefficient in
S'
for the expression as a whole to remain reducible.
Subrule 6.1 is trivial.
Repetition times :b is huge,
but systematically reducible.
Subrule 6.2 counts down a dimension before repeating it,
no problem there.
Subrule 6.3 in Bean evaluates just
the type of the comma subscript, following the rules above,
which have already proven to maintain reducibility.
Subrule 6.3 in Beaf also just evaluates
the type of the comma subscript,
but it pastes the subexpression
V0 from the original or top level
into the level of the subscript. And it does so persistently,
but always as a substituted value, never as an inserted word.
We carefully check that there is no
automatic nesting of subscripts in subscripts taking place,
which could happen at a more advanced stage of the algorithm.
This holds for any subscripted comma in a dimension block
D
which will be redistributed within commas in between blocks –
because it surely lived on the same depth in the original expression before.
And this holds for the subexpressions V0 –
each is to be evaluated individually to Big number.
In our experience, the further the algorithm is expanded,
the smaller the relative gap between the accumulated
b and V becomes.
So to simplify the issue we may fill in b
in place of V0 in place of V'
in subrule 6.3 of Beaf, and look again.
This transformed dimensional expression X' can be transposed
into an expression of Beat,
by replacing all inserted a by b.
This expression is larger, but similar to Bean,
and therefore reducible in place in D
the same way as it is on the original level.
This solves the problem –
all expressions of Beaf (and likewise of Beate)
are reducible to natural number.
Is Beaf significantly greater than Bean?
Generally, all exploded dimensions D
are dominated by the size b of their highest dimension
(in the reduced expression followed by the original
,[S] separator type).
The newly exploded dimensions are huge,
but the right part with the higher parameters in the original
(that are missing from the dimension blocks D)
is more significant.
That is because all dimensions D
are constructed simply by one iteration
on the right – an angel's feather –
the right part can outlast any lower dimension…
So the substitution of the longer sequence V0 in
subrule 6.3 of Beaf
recursively wins over the upload of a shortening D[V]
inside the dimension block of Bean.
But the application of this rule is a rare (though systemic) occassion.
We doubt if this effect is stronger than the size b
inflating the dominant dimension directly in both systems.
We found that
value b can rival subexpression V
(as V is equivalent to a single countdown of
Big c).
So in theory both V'
could well be replaced by the same b.
And yes, in each block D we find the
original b in place,
but once it is uploaded in subrule 6.3 Bowers puts value
a in second position.
Now in top level expressions the next b
will be Bigger than before, but
D[a,a,c,Z] has no motor rule
to increase the second entry.
So Bean's subrule 6.3 from the second call onwards will
upload the fixed value of a.
And subrule 6.2 just counts off c
to spread out dimensions of size a which is small,
but not significantly, as the highest dimension size b
got out first and it still dominates.
A good working motor-upload cascade produces the Biggest numbers.
But the inner motor in D
is turned outward, it does not accumulate and
the high upload value – the dimensional subexpression
D[V] – is increasingly ineffective
against the original V0.
This results in a subscript algorithm in Bean
which is weaker than that of Beaf.
Still, the greatest dimensional gain is made at the start,
and the first V' is strongest
because it contains the original b
(comparable to V0).
Our conjecture is that Beaf
is NOT significantly faster than Bean
[put to the test later!].
The systems Eat and Beat we introduced
earlier
don't replace second entry b in the upload,
and b is comparable to V, so
our systems are not significantly slower than Beaf.
This must hold even when higher structures get involved.
On the brighter side Beate runs ahead of
Beaf, but not much.
The only difference lies in their upload rules with its rare substitution
of insignificant parameters by b instead of a.
On creating world record numbers
This is not the place to eat any more Beaf,
because there's no need to produce
any Bigger numbers in what follows.
After the superexponential
array dimensions
Bowers conjures up a cornuscopia of characters and carefree notations,
that are more inspirational than practical,
and that do not help your Bigness grow very fast.
It's a difficult job, but we must
find out
what Jonathan Bowers once intended.
Using the
Bean
rules listed above we continue at a leasurely pace to meet with
Bowers's world record number Meameamealokkapoowa Oompa!
and calculate it rigourously (present proof by estimation)
for the very first time.
 From that Beate's version will follow,
already markedly larger.
Superduperseded by her system's highest ***
Beate's Mountain Top ***
the new largest number in the world !!!
From that Beate's version will follow,
already markedly larger.
Superduperseded by her system's highest ***
Beate's Mountain Top ***
the new largest number in the world !!!
(A good thing! Juggler-mathematician
Ronald Graham
recommends having a number on your name,
no matter if you invented it or what ;-)
And there Beate goes, off piste from that snowy mountain,
descending with great speed, like forever…
while she keeps on wondering,
“Why can't I stop?”
After this article was written an email came in from Chris Bird's mother,
that Chris had updated his array functions, specially the
Beyond Bird's Nested Arrays
articles I,II & III,
which (in their new form) give rise to much larger numbers.
So Beate's Mountain Top
may have been the best defined largest number in the world for 20 days,
but it is no more (or ever was?) a world record.
Types of Arrays
Linear:
Linear arrays consists of one row, ex: {3,5,6,1,3,4,2} - these are
the smallest and simplest arrays - even though the arrays are small,
the value of the arrays can be so huge that not even Conway's Chained
Arrow notation can keep up (an array with only 5 entries will clobber
Chained Arrow!!). The positions on the array can be represented by a
positive integer, i.e. the 17th position.
Dimensional:
Dimensional arrays have a multidimensional structure - these are the
second smallest arrays. These arrays consists of rows, planes, realms,
flunes (4-spaces), and various n-spaces. The rules above can easily
handle dimensional arrays - although the results seem to nearly reach
infinity. The positions in the array can be described with a linear
array, i.e. (4,5,3,1,2) represents the 4th entry on 5th row on 3rd
plane on 1st realm on 2nd flune. Dimensional arrays can be represented
as follows: {4,2,5,7 (2) 5,6,1,2 (2) 5,4 (1) 6 (3)(3)(2) 2,5,6 (1)
1,1,1,7 (2) 6,8,5,2 (5) 7,5,6,8}. Here (2) represents going to next
second dimension (or going to next plane), (3) is next realm, (5) is
next 5-space.
Tetrational:
These arrays go way beyond dimensional arrays, and take on
structures that require tetrational spaces. They consist not only of
rows, planes, realms, etc, but also dimensional groups, rows of groups,
planes of groups, groups of groups, groups of groups of groups of
groups, gangs, rows of gangs, groups of gangs, gangs of gangs, realms
of groups of groups of gangs of gangs of gangs, etc, etc, etc,
superdimensional groups, trimensional groups, etc,etc. These are the
third smallest arrays (and the largest type that I have fully grasped
how they work). Tetrational arrays consist of super dimensional arrays,
trimensional, quadramensional, etc in the same way dimensional arrays
consists of planar, realmic, flunic, etc arrays.
Positions of superdimensional arrays can be described by a
dimensional array, i.e. (5,6,3 (1) 3, 5 (1) 6,7 (2) 5) represents the
5th entry of the 6th row of the 3rd plane of the 3rd dimensional group,
of the 5th row of groups, of the 6th group of groups, of the 7th row of
group of groups of the 5th dimensional gang. To represent a 3^(3^2)
array, let A represent the 3^3 dimensional group {3,3,3 (1) 3,3,3 (1)
3,3,3 (2) 3,3,3 (1) 3,3,3 (1) 3,3,3 (2) 3,3,3 (1) 3,3,3 (1) 3,3,3}, now
a 3^(3^2) array of 3's would be {A,A,A (1,1) A,A,A (1,1) A,A,A (2,1)
A,A,A (1,1) A,A,A (1,1) A,A,A (2,1) A,A,A (1,1) A,A,A (1,1) A,A,A} To
get a 3^(3^3) array let A be equal to the group of groups mentioned
above (the 3^(3^2) array that is) and let (1,1) and (2,1) change into
(1,2) and (2,2) respectively.
Positions of trimensional arrays can be described by a
superdimensional array, positions of a quadramensional array can be
described by a trimensional array, etc.
Pentational:
Next in line are pentational arrays, these require pentational
spaces. Trying to understand how these work might give someone a
migrane. One would need to keep up with tetration levels which can also
get out of hand. There will be tetrational groups that show up here,
X^^X arrays are more tidy examples of tetrational groups. a X^X^X^X^X
array is a tetrational one, quintamensional to be exact (keep in mind
that powers are solved in reverse) - for pentational arrays, the powers
will sort into groups, i.e. an
X^X^X^X^{X^X^X^X^X}^{X^X^X^X^X}^{{X^X^X^X^X}^{X^X^X^X^X}^{X^X^X^X^X}^{X^X^X^X^X}^{X^X^X^X^X}}
array, the {} are not to be solved like ordinary parenthesis, but are
used to group up the exponents into tetrational blocks - the number of
entries in this array can be found out by removing the {} and solving -
ie. X^^39 in this case - and this is barely scratching the beginning of
pentationals.
Beyond Pentationals:
Hexational, heptational, expandal, multiexpandal, explosal,
powerexplosal arrays, etc. arrays so huge that the space its in needs
to be represented by array notation (linear, dimensional, tetrational,
and so forth) - how to work with these? - Only God knows - but they
should form some massive arrays - and utterly unspeakable numbers when
solved.
After superdimensions come the Next Legion
arrays:
{3,3,1,2,[1,2]2} = {3,3,{v},[1,2]2} = 3^..3 ^:v
v = 3,2,1,2,[1,2]2 = 3,3,3,[1,2]2 = 3^^^^3
{a,3,1,2,[1,2]2} = a^..a ^:v ≅ a1&a&a&a
v = a,a,a,[1,2]2 = a^..a ^:a1 ≅ a1&a&a
Bowers devises new notations for old style recursions:
a,b1,1,2,[1,2]2 = {a,a,..a.,[1,2]2} :b:
≅ a1.&a.. :b1 ~ {a1,b2 /2} = Â
Big boowa
example:
3,3,3 /2 =
3,v,2 /2 = 3,..1. /2 :v:
v = 3,2,3 /2 = 3,3,2 /2 = 3,3&3&3 /2 <~
3,3,3,2,[1,2]2 =
3,v',2,2,[1,2]2 = 3,..1.,1,2,[1,2]2 :v':
v' = 3,2,3,2,[1,2]2 = 3,3,2,2,[1,2]2
= 3,{3,3,{3,3,3,[1,2]2},[1,2]2},1,2,[1,2]2
Bowers' 2nd legion defined on the row:
a,b,c,2,[1,2]2 ≅ {a,b,c /2}
a,b,c,d1,[1,2]2 ≅ {a,b,c,d /2}
a,b,c,d1,R,[1,2]2 ≅ {a,b,c,d,R /2}
Structures preceding the 3d legion:
a,2,[1,2]3 = D[a,a,a],[1,2]2 = a^a /2
a,b,[1,2]3 = D[a,b,1,2],[1,2]2 = a^^b /2
a,3,2,[1,2]3 = a,{a,a,[1,2]3},[1,2]3 = a^^^3 /2
a,b,c,[1,2]3 = a^..b /2 ^:c1 ≅ c1&b&a /2
Next legions defined on the row:
a,b,1,2,[1,2]f1 ≅ {a1.&a.. /f} :b ~ {a,b1 /f1}
a,b,c,1R,[1,2]f ≅ {a,b,c,R /f}
The Next Legion:
Let & represent "array of", so 3 & 3 = {3,3,3} = tritri = 3
to the power of itself 3^27 times - now consider 3&3&3 (solved
frontwards) this is a {3,3,3} array of 3's which is a 3^^^3 array of
3's - now imagine a new array notation such that the second rule
changes to this:
Condition - no pilot, result - v(A)=b&b&b&b&.....&b&b -- p times - welcome to the next level of array notation.
Another way to represent this is to simply add an entry with value 2
in a second "legion", where the first legion can take on any of the
previous arrays - {3,3 / 2} = 3&3&3, the big boowa = {3,3,3 /
2} = 3&3&3&3&3&............&3 - where there are
3&3&3.......&3 3's arrayed to each other - where there are
3&3&3.....3 3's arrayed to each other - where there are
3&3&3.....&3 3's arrayed to each other - ... - ... - ... -
- - - this is said 3&3&3&3&......&3 times - where
there are 3&3&3 3's arrayed to each other here before getting
to the end (which is "where there are 3 3's arrayed to each other")!!!
- keep in mind that in {3,3,3 / 2} 3,3,3 are in the first legion and 2
is in the second legion - this 2 represents "second level of array
notation".
One can consider {b,p / 2} as if the pilot is in the 2nd legion, and
in this case the airplane is defined to be a b&b&b...&b p
times - array in the first legion - of course you can go to the 75th
level of array notation if you like - {b,p / 75} =
{b&b&b....&b - p times - array / 74}. Note that {A / 1} =
A, so 1's are still default.
Linear Legion Arrays:
{A1 / A2 / A3 / A4 / ..... An} - here each of the An's are arrays
(can be linear, dimensional, tetrational, pentational, etc - up to but
not including legion arrays) - nuf said!!!
Linear legion
arrays resolved from right to left:
D[a,b,c],[1,2]f = Â /f
a,b,1,2,[1,2]2,2 == a,v,[1,2]1,2 with v = Â
= D[a,v,1,2],[1,2]{a,v-,[1,2]1,2}
== D[a,v,1,2],[1,2]{..1.} :v:
= R^^v,[1,2]{..a.} :v:
= Â,[1,2]{..a.} :v:
= Â /..a #Â ~ Â(/2)Â = Â(/3)2
Arrays of Bean translated to Bowers' dimensional legions
:
a,b,2,2,[1,2]2,2 = Â(/2)Â(/2)Â = Â(/3)3
a,b,c,2,[1,2]2,2 = Â(/3)c1
a,2,1,3,[1,2]2,2 = a,a,a,2,[1,2]2,2 = Â(/3)a1
a,3,1,3,[1,2]2,2 = Â(/3)Â(/3)a1 ~ Â(/4)3
a,b,1,3,[1,2]2,2 = Â(/4)b
a,b,2,3,[1,2]2,2 = Â(/5)b
a,b,c,3,[1,2]2,2 = Â(/c3)b
Further array structures are ill-defined, we imagine that:
a,b,R,[1,2]2,2 = Â(/R)b
a,b,[1,2]3,2 = Â(/Â)b ~ Â//2 (Legion legions
)
a,b,R,[1,2]3,2 = Â(/Â)Â(/R)b
a,b,[1,2]c1,2 = Â//c ~ Â(//2)2
a,b,[1,2]c,3 = Â///c ~ Â(///2)2
a,b,[1,2]c,d = Â/..c /:d
a,b,[1,2]c,d,2 = Â/../(1)c /:d
a,b,[1,2]c,d,e1 = Â/../(1)..c /:d /(1):e ~ Â/(2)e
a,b,[1,2]ci,..z ci,:n ~ Â/(n)z
a,b,[1,2],[1,2]2 ~ Â/(Â)b ≅ L (Legion space
)
Dimensional Legions, Tetrational Legions, Legion Legions, and beyond:
One can take arrays further to include things like the following:
{A / A / A / A (/2) A / A / A (/3,4,5,2) A }
- this is a tetrational legion array.
{3,3 // 2} - a legion legion array - this is equal to
3&&3&&3, where 3&&3 = {A / A / A} where A =
3&3&3 array (in other words 3&&3 is a 3 legion array of
3's), 3&&3&&3 = 3&&3 legion-array of 3's. -
note that a mere 3^3 legion array of 3's would be {A / A / A (/1) A / A
/ A (/1) A / A / A (/2) A / A / A (/1) A / A / A (/1) A / A / A (/2) A
/ A / A (/1) A / A / A (/1) A / A / A} - which is nothing compared to a
3&&3 legion array of 3's
{3,3 /// 3} - a legion legion legion array - which equals
3&&&3&&&3, where 3&&&3 = {A // A //
A} where A = 3&&3&&3 array of 3's
{3,3 //////////////// 2 } - use your imagination.
{3,3 ///(1)///(1)///(2)///(1)///(1)///(2)///(1)///(1)/// 2 } -
the next step would be to give the legions themselves an added
structure - {3,3 (1)/ 2} (the legion mark is in the second row of
legion marks) - but how would we define this, first lets come up with a
new kind of space called "legion space" - we can think of it as the
highest extent of space before we encounter the legions, in the same
way that X represents the line, and X^X is above all dimensional space,
legion space "L" is above all of the non-legion array notation spaces -
that means it is beyond tetration {X,n,2}, pentational {X,n,3}, linear
array-spaces {X,X,X,X,X,X,...,X}, dimensional array-space 100^100 &
X's, and even X&X&X&X&X&5 - the prime block of a
legion space would be b&b&b&b....&b - p times (b=base).
Legion of legions describe the double legion marks //, while a legion
"of itself" 50 times would have 50 legion marks - so lets define {L,n}b,p as legion of legion of legion of....legion - n times using b and p as the base and prime. {L,1}b,p = {b,p / 2} = b&b&b&b&b... p times, {L,2}b,p = {b,p // 2} = b&&b&&b&&b... p times - which is the prime block of a legion of legions. {L,X}b,p
= {b,p (1)/ 2} = {b,p //////....///// 2} - p /'s - notice how the
previous row of /'s is the prime block of the row of /'s - so we can
still use that rule here. Next we can do {L,A} - where A is an
array-space - this will lead to the legion marks themselves taking on
an array structure, not just the separate legions. We can continue with
{L,L} - here the legion marks will take on legion space - and it gets
worse, for {L,L} = {L,2,2}, so lets go for {L,3,2} - this would be
{L,{L,2,2},1} = {L,{L,L}} - the legion marks taking on a legion of
legions - can you feel the tension. Next would come things like
{L,X,2}, {L,A,2}, {L,X,6}, {L,L,L,L,L,L,L,L}, 100^100 array of L's -
this is array notation on the legion space - all this will lead to the
next group - "lugions"
In Bowers' gallery of numbers a Mark Lugo steals the show:
a,b,ci..,[1,2],[1,2]2 ,ci:n ≅ {L,..1} L,:n2
a,b,[1,2],[1,2]3 ≅ L2
a,b,[1,2],[1,2]n1 ≅ Ln
Approximately Bowers' last batch:
a,b,[1,2],[1,2],[1,2]2 ≅ LL
a,b.,[1,2]..2 :n1 ≅ L.. :n
a,b,[2,2]2 ≅ M
A plausible upper bound to Bowers' final fantasy:
a,b,[13,5,2]2 ≅ MEA!
a,20,[1,[1]2]2 ~> MEAMEAMEALOKKAPOOWA!
10,20,[15,15,13,16,2,[1]2]2 ~>
MEAMEAMEALOKKAPOOWA OOMPA! < 3,3,[3,[1]3]3
Lugions, Lagions, Ligions, and beyond
We will use the following to describe lugions, the lugion mark is \,
"legiattic array of" mark is @ (symbols were suggested by John
Spencer), and finally Lugion space will be L2. {L2,1} b,p = {b,p \ 2} = b@b@b@b....@b - p times - where n@m = {L,L,L,.....,L}n,m - there are m L's - so a 3@3 legiattic array is {L,L,L}3,3 - a 3@3@3 legiattic array would be {L,..a....,L}3,3 where a = {L,L,L}3,3.
We can continue with double lugions (or lugions of lugions) {L2,2}
cases which lead to double lugion marks in the arrays "\\". Look what
can be done to the lugiattic space arrays - {L2,X}, {L2,A}, {L2,L},
{L2,B} - B is a legiattic array, {L2,L2} = {L2,2,2},
{L2,L2,L2,L2,L2,L2}, 100^100 array of L2's, legiattic array of L2's -
and finally the lagions L3 - we can do similar things there. Lagion
marks are |'s, we can use % to denote "lugiattic array of". L4 space is
the ligion space, we can use "-" for ligion marks, and # for "lagiattic
array of". Of course we can continue to
L5,L6,...L100,...L(gongulus),......
Going even further
Now imagine LX space where the X can change to p when finding the
prime blocks of the space, L(X+1), L(2X), L(X^2), LA, LL, LL2, LLL,
LLLLLLLLLLL, LLLL(1)LLLL(1)LLLL (3 rows of L's) - 10^100 array of L's
(no comma's between them this time) - just use the imagination to where
this could lead . . . MEAMEAMEALOKKAPOOWA OOMPA!
Beate is the acronym for the algorithm Beate's Express Array Train Extra
and its rules are discussed above as a variation on our definition of Beaf,
with series of the (accumulated) b uploaded left of V (instead of items a).
Inspired upon our restoration of the ancient Indian Asamkhyeya
– the incalculable number 10^(5*2^104) (a tower of squares).
Beate's Mountain Top =
10,5,[.. .]2 :104: in Beate ,[ ] ≡ ,
Algorithmically larger than the highest of Bowers' numbers, but still below infinity
– for a higher type of countable infinity, replace the coefficients above by omega ω.
 From that Beate's version will follow,
already markedly larger.
Superduperseded by her system's highest ***
Beate's Mountain Top ***
the new largest number in the world !!!
From that Beate's version will follow,
already markedly larger.
Superduperseded by her system's highest ***
Beate's Mountain Top ***
the new largest number in the world !!!